Исследовательская часть
bmpm + bm-1pm-1 +… b1p + b0
Согласно [5] передаточная функция замкнутой системы после приведения соответствующих степеней при p определяется через передаточную функцию разомкнутой системы (2.2.25) и имеет вид:
anpn + an-1pn-1 +…+ a1p + a0
Wз.с. (p)= ¾¾¾¾¾¾¾¾¾¾¾¾ . (4.7)
ckpk + ck-1pk-1 +… c1p + c0
В нашем случае исследуется передаточная функция замкнутой системы по управляющему воздействию, связывающая выходную информацию по угловой скорости с управляющим воздействием Uзад, и передаточная функция замкнутой системы по возмущающему воздействию Wa00,Ma00(p) выходную информацию по угловой скорости с возмущающим воздействием Мa00.
Преобразуем передаточные функции системы управления установкой к виду, удобному для анализа посредством простого грубого критерия устойчивости. С помощью пакетов MATHEMATICA 2.2. [6,2, 1,18] и REDUCE [7], передаточные функции преобразуются к указанному виду.
В нашем случае исследуется передаточная функция замкнутой системы по управляющему воздействию, связывающая выходную информацию по угловой скорости с управляющим воздействием Uзад В нашем случае- это передаточная функция Wa·,Uзад(р) в группе формул (2.2.51).
Как следует из соотношения (2.2.50), масштабный коэффициент установки зависит от скорости вращения платформы . Поэтому оценка устойчивости системы производилась в контрольных точках при изменении угла поворота платформы a от 0° до 360° с шагом 36°. Таким образом, получены 10 контрольных точек, по которым можно судить об устойчивости системы при различных углах поворота платформы.
На рис. 17 приведены значения ri , зависящие от порядковых номеров i и от угловой скорости a (Р1 соответствует 36О, а Р10 - 360О).
В [10] приведены коэффициенты Ki для работы установки при a от 36О до 360О с шагом 36О. На рис. 18 значения данной таблицы представлены графически в виде зависимости значений Ki, зависящих от порядковых номеров i и от угловой скорости a (Р1 соотвествует 36О, а Р10 - 360О).
Таким образом, из рис. 17 и 18 следует, что для a = 0O существуют i, i=7 15 и для любого a Î (0O,360O), существуют i, i=8 15, при которых выполняется
< Ki < 6, из чего можно сделать вывод, что система управления установкой сравнительно близка к границе устойчивости во всем спектре частот.
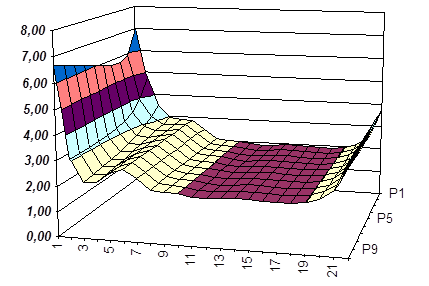
Рис. 17. Значения коэффициентов Лебедева ri в режиме работы установки
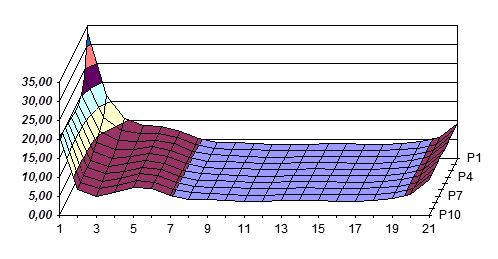
Рис. 18. Значения коэффициентов Лебедева Ki
Заключение
В результате выполнения бакалаврской работы по модернизации прецизионного одноосного управляемого основания для медицинских целей были проведены следующие работы и получены следующие результаты:
1. Произведена замена шести кварцевых акселерометров на четыре акселерометра тогоже типа для упрощения схемы и исключение из системы управления установкой датчика угловой скорости.
2. В результате расчета основных параметров прибора коэффициент демпфирования n=4.03´10-3 Нм, маятниковость ml=0.16´10-8 Нм, крутизна датчика момента kдм=1.13 Нм/А.
3. Проведена разработка пробиркодержателя для центрифугирования
4. Проведена разработка качающейся платформы для целей культивирования микроорганизмов. В экономической части рассчитана себестоимость изготовления партии модернизированных приборов, определен срок окупаемости дополнительных капиталовложений - приблизительно 8 месяцев.
Приложение
1. Графики АФЧХ и переходных процессов.
. Программа реализации математической модели устройства
Выполнена на алгоритмическом языке Borland С++ версии 3.1.
Назначение: производит расчет амплидудно - фазовых частотных характеристик управляемого основания по схеме 1.12 в первом и во втором режиме работы.