Расчет основных параметров качающейся платформы
Расчёт шагового двигателя
Произведем расчет шагового двигателя ДШР40-3,6-1000, который будет использоваться в механизме встряхевателя для пространственного перемещения платформы. Шаговый двигатель ДШР40-3,6-1000 наиболее подходит к данной конструкции прибора в связи с тем, что обеспечивается более точная отработка скорости перемещения платформы и не требуется введение обратной связи для отслеживания скорости перемещения. Расчет будем вести для одного двигателя, так как три установленных двигателя абсолютно идентичны.
Задание на проектирование
напряжение питания - U=5 [B];
момент нагрузки на валу - Мн= 0.8 Н*мм;
Шаг двигателя - αш=3,6°;
Число фаз - m=4;
Частота приемистости - fпр=130 [имп/сек].
Число обмоток управления в фазе n=4
Схема коммутации - четырёхфазная.
Режим работы - продолжительный.
Определение основных размеров двигателя
определим магнитную постоянную С.
Перед её вычислением выберем магнитный сплав типа ЮНДК - 15. Его основные данные:
Br = 0,75Tл;
Нс = 48000а/м - коэрцитивная сила;
I = 0,6; Bρ = 0,65Tл; α = 3,6°; Коб=1.
Вычисляем число зубцов 2р и полюсов ротора Z:
![]() ; (3.2.27)
; (3.2.27)
р=26;
![]() ; (3.2.28)
; (3.2.28)
Z=52;
По графику на рис. 7 выбираются величины коэффициента кр:
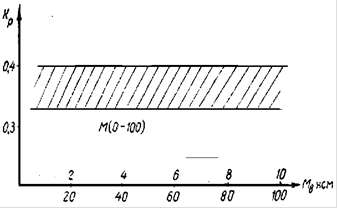
Рис.7. Зависимость относительной высоты полюса ротора от момента на валу ШД.
Выбираем кр=0.38.
Тогда
![]() ; (3.2.29)
; (3.2.29)
 ;
;
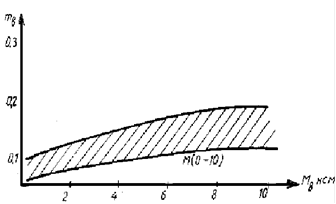
Рис.8. К определению максимального статического момента.
Максимальный статический синхронизирующий момент:
![]() ; (3.2.30)
; (3.2.30)
Предварительно примем mв=0,1.
![]() =
=![]() Нмм;
Нмм;
Выбор величины отношения x - длины пакета статора lст к диаметру расточки статора Дст. С целью получения большего быстродействия целесообразно выбирать большие значения коэффициента x. В этом случае при одном и том же объеме ротора у машины с меньшим диаметром Дст значительно уменьшается момент инерции ротора и повышается частота приемистости при одном и том же моменте нагрузки. Однако охлаждение обмоток статора при этом ухудшается. Зависимость коэффициента x от полезного момента Мв для шаговых двигателей приведена на рис.9.
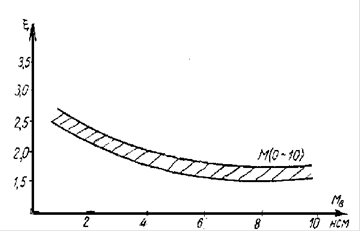
Рис.9. К определению основных размеров ШД.
![]() ;
;
Определяем диаметр расточки статора и длину статора:
 ; (3.2.31)
; (3.2.31)
![]() ;
;
![]() ; (3.2.32)
; (3.2.32)
Lст=1,8*1,8=32,4 мм;
Диаметр и длинна ротора:
Наружный диаметр ротора Др отличается от диаметра статора на величину удвоенного воздушного зазора dо (dо=0,12мм);
Др=Дст-2δ0; (3.2.33)
Др=17,27 мм;
Lp=Lст+(0,1¸0,3). (3.2.34)
Принимаем Lp=Lст+2 [мм].
Lp=32,4 мм.
Предварительная оценка динамических свойств шагового двигателя
Предварительная оценка динамических свойств проектируемого ШД сводится к ориентировочному определению частоты приемистости двигателя, развивающего заданный полезный момент mв при работе на частоте приемистости fпр.
Определяем Н.Д.С. обмоток статора
![]() ; (3.2.35)
; (3.2.35)